Ref: EWTAMPC60
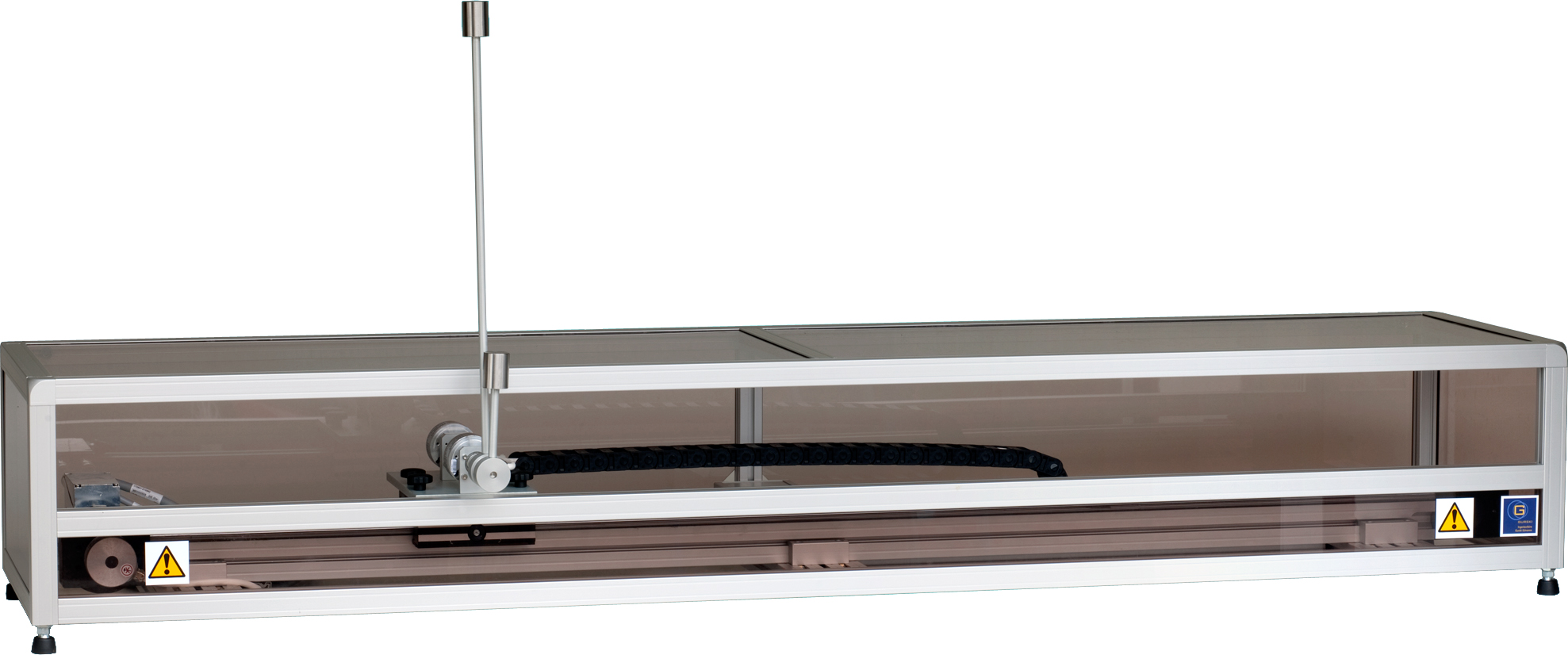
PC60 Système d'asservissement de position d'une plate forme sur un axe linéaire de 1500 mm
avec boîtier pour alimentation et mesure, sans régulateur, documentation en anglais, PO Seule
Nécessite carte et logiciel
- Régulation électromotrice de la position d'une plateforme mécanique avec différents accessoires et selon différentes méthodes de régulation
- Régulation de systèmes complexes (4ème et 6ème ordre)
Pendule inversé (avec option complémentaire)
Pendule tandem inversé (avec option complémentaire)
Pont élévateur avec câble de longueur variable (avec option complémentaire)
- Comparaison entre la régulation d'état et la logique floue
- Utilisation d'observateurs pour la comparaison de frottements
Moteur à CC avec capteur incrémental, 2 interrupteurs de fin de course
Un chariot est entraîné sur un axe linéaire de 1,5m par un moteur synchrone tri-phasé.
Un capteur incrémental mesure la position du chariot.
Le châssis du système est en aluminium profilé et recouvert par une protection en plexiglace
Connexions électriques via un connecteur multi-broches.
Dimension (Lxlxh) : 1880x430x270 mm
Poids : 40 kg
Entrées:
Tension nominale du moteur (+24 V, nom. 12,5 A, couple nominal 0,7 Nm)
Alimentation pour capteur de fin de course +15 V
Tension dalimentation du capteur incrémental : +5 V
Sorties:
2 capteurs de fin de course (gauche/droite)
Position (capteur incrémental : 0.044 mm/incr, gamme : +/- 600mm)
2 signaux binaire didentification du système
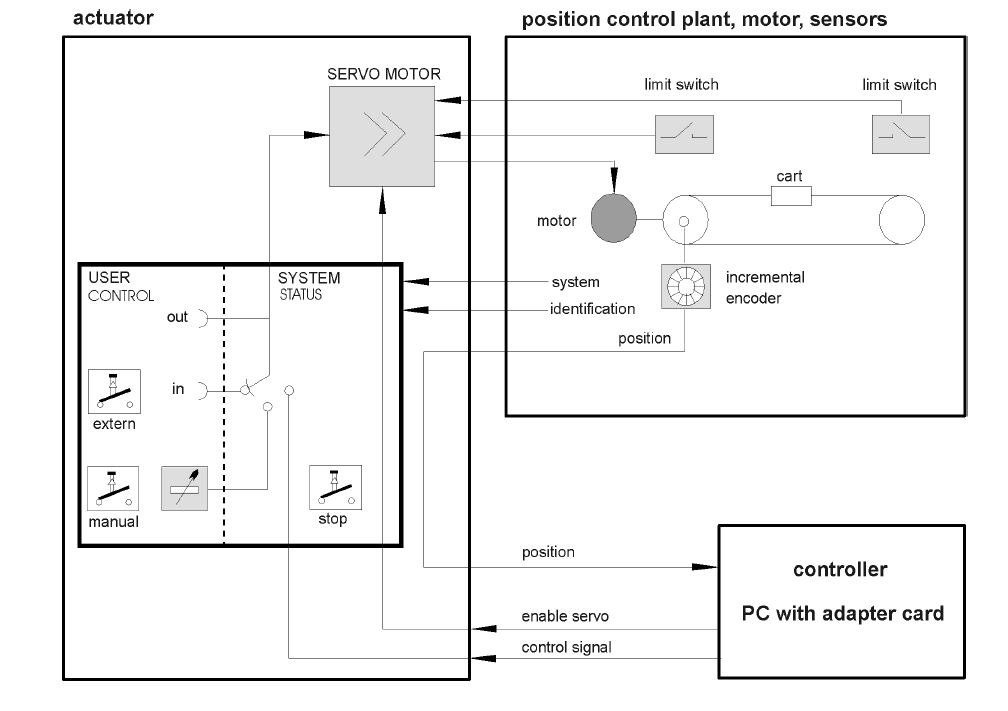
Le boîtier de commander
Boitier 19"- (Lxlxh : 470x370x156 mm - Poids :10 kg)
Comprenant:
1x servomoteur
1x alimentation
2x Unités de commande du système (System Status, User Control).
Lunité « System Status affiche : létat du système (connecté à lactionneur, prêt pour lexpérience) et le type de commande (manuel / PC / externe).
Lunité User control intègre deux clés (mise en marche manuelle ou commande externe), un potentiomètre (commande manuelle du signal), deux sorties de mesure (signaux de commande pour les servo-amplificateurs) et deux signaux dentrée (signaux de commande externe pour les servo-amplificateurs) ainsi quune touche pour stopper nimporte quel contrôleur.
Le servo-amplificateur pour le système pont élévateur est déjà inclus dans la version standard.
Alimentation : 220 V, 50 Hz, 400 W
Entrées du servo-moteur :
2 interrupteurs de fin de course (gauche/droite)
Signal de commande : -10 ... +10 V
Servo active / désactivé
Sorties de lunité servo:
Signal de commande pour le moteur
- Régulation électromotrice de la position d'une plateforme mécanique avec différents accessoires et selon différentes méthodes de régulation
- Régulation de systèmes complexes (4ème et 6ème ordre)
Pendule inversé (avec option complémentaire)
Pendule tandem inversé (avec option complémentaire)
Pont élévateur avec câble de longueur variable (avec option complémentaire)
- Comparaison entre la régulation d'état et la logique floue
- Utilisation d'observateurs pour la comparaison de frottements
Moteur à CC avec capteur incrémental, 2 interrupteurs de fin de course
Un chariot est entraîné sur un axe linéaire de 1,5m par un moteur synchrone tri-phasé.
Un capteur incrémental mesure la position du chariot.
Le châssis du système est en aluminium profilé et recouvert par une protection en plexiglace
Connexions électriques via un connecteur multi-broches.
Dimension (Lxlxh) : 1880x430x270 mm
Poids : 40 kg
Entrées:
Tension nominale du moteur (+24 V, nom. 12,5 A, couple nominal 0,7 Nm)
Alimentation pour capteur de fin de course +15 V
Tension dalimentation du capteur incrémental : +5 V
Sorties:
2 capteurs de fin de course (gauche/droite)
Position (capteur incrémental : 0.044 mm/incr, gamme : +/- 600mm)
2 signaux binaire didentification du système
Le boîtier de commander
Boitier 19"- (Lxlxh : 470x370x156 mm - Poids :10 kg)
Comprenant:
1x servomoteur
1x alimentation
2x Unités de commande du système (System Status, User Control).
Lunité « System Status affiche : létat du système (connecté à lactionneur, prêt pour lexpérience) et le type de commande (manuel / PC / externe).
Lunité User control intègre deux clés (mise en marche manuelle ou commande externe), un potentiomètre (commande manuelle du signal), deux sorties de mesure (signaux de commande pour les servo-amplificateurs) et deux signaux dentrée (signaux de commande externe pour les servo-amplificateurs) ainsi quune touche pour stopper nimporte quel contrôleur.
Le servo-amplificateur pour le système pont élévateur est déjà inclus dans la version standard.
Alimentation : 220 V, 50 Hz, 400 W
Entrées du servo-moteur :
2 interrupteurs de fin de course (gauche/droite)
Signal de commande : -10 ... +10 V
Servo active / désactivé
Sorties de lunité servo:
Signal de commande pour le moteur
Poids: 40 Kg Delai de livraison estimé : 12 semaines